CN

我们非常重视您的个人隐私,当您访问我们的网站时,请同意使用的所有cookie。有关个人数据处理的更多信息可访问《隐私政策》
该技术通过自主开发的多阶S曲线速度算法,应用于多种产品的直线往复运动控制。尤其是在加速与减速过程中,通过建立距离与时间变量的高阶函数,通过速度环与位置环的双重反馈控制,进行PID(比例-积分-微分)调节,可以让设备实现又快又稳定的加减速效果。
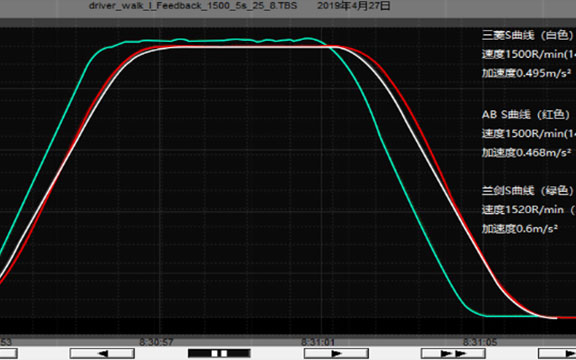


该技术为多种基于高等阶数的多阶贝塞尔曲线,相比低阶(<3)的贝塞尔曲线的行走控制技术,车辆行走更平稳,货物晃动更小,行走效率提高10%以上。
该技术具备很好的模拟人工驾驶叉车行走路线的特点。特别是在转弯环节,相比业内常用的弧线行走控制技术,转弯效率更高且行走平稳,在直角转弯工况下可提升40%以上的工作效率。
以堆垛机为例,采用一阶多段速度控制方法,目标点的定位时间往往需要4-6s;而采用多阶S曲线的速度控制技术,定位时间可以达到0.5s以内。

该技术已经获得多项相关专利、软件著作权等自主知识产权证书
AGV贝塞尔曲线运动控 制系统V1.0
堆垛机S型曲线运动控 制系统V1.0

穿梭车s型曲线

完善您的信息,兰剑智能专业团队为您提供服务!